Tài liệu "LV tiến sỹ giải bài toán ngược động học động lực học và điều khiển trượt robot dư dẫn động dựa trên thuật toán hiệu chỉnh gia lượng vector tọa độ suy rộng" có mã là 231490, file định dạng rar, có 155 trang, dung lượng file 12,477 kb. Tài liệu thuộc chuyên mục: Luận văn đồ án > Tổng hợp. Tài liệu thuộc loại Vàng
Các chức năng trên hệ thống được hướng dẫn đầy đủ và chi tiết nhất qua các video. Bạn click vào nút bên dưới để xem.
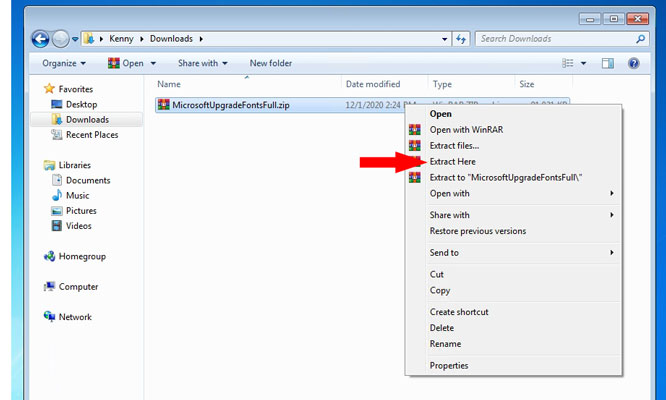
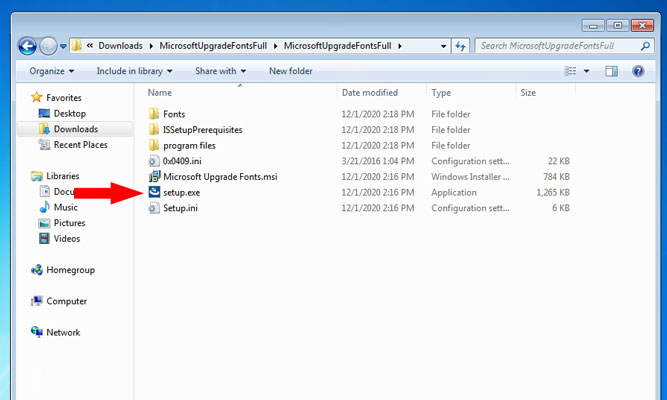
Có thể tài liệu LV tiến sỹ giải bài toán ngược động học động lực học và điều khiển trượt robot dư dẫn động dựa trên thuật toán hiệu chỉnh gia lượng vector tọa độ suy rộng sử dụng nhiều loại font chữ mà máy tính bạn chưa có.
Bạn click vào nút bên dưới để tải chương trình cài đặt bộ font chữ đầy đủ nhất cho bạn.
Nếu phần nội dung, hình ảnh ,... trong tài liệu LV tiến sỹ giải bài toán ngược động học động lực học và điều khiển trượt robot dư dẫn động dựa trên thuật toán hiệu chỉnh gia lượng vector tọa độ suy rộng có liên quan đến vi phạm bản quyền, bạn vui lòng click bên dưới báo cho chúng tôi biết.
Tài liệu vừa xem